Ethernet通信コマンド制御(コマンド単体)
| PLC対応機種 | KEYENCE KV-5000 |
|---|---|
| 対応機種 | 全機種 |
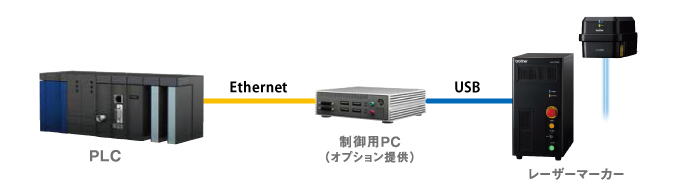
| 概要 | Ethernetによる通信コマンド処理で、レーザーマーカー*を制御するサンプルラダーです。内部デバイスをONすることで各コマンドを単体で処理します。 |
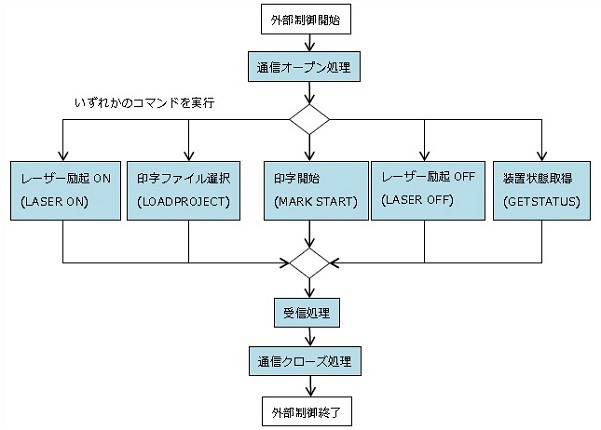
フローチャート
デバイス一覧
入力デバイス
なし
出力デバイス
なし
内部デバイス
| デバイス名 | 入/出 | 用途 | 備考 |
|---|---|---|---|
| MR000 | 入力 | TCPオープン開始用内部スイッチ | レーザーマーカーとの通信を開始します。 |
| MR001 | 入力 | クローズ開始用内部スイッチ | レーザーマーカーとの通信を終了します。 |
| MR010 | 入力 | レーザー励起ON用内部スイッチ | レーザー励起状態をONにします。 |
| MR011 | 入力 | 印字ファイル選択用内部スイッチ | 印字ファイルNo.1の選択処理を開始します。 |
| MR013 | 入力 | 印字開始用内部スイッチ | 印字処理を開始します。 |
| MR014 | 入力 | レーザー励起OFF用内部スイッチ | レーザー励起状態をOFFにします。 |
| MR015 | 入力 | 装置状態取得用内部スイッチ | レーザーマーカーの装置状態取得を開始します。 |
| MR100 | – | 受信設定完了 | 受信設定が完了したらONします。 |
| MR800 | – | 装置状態取得コマンドON | レーザーマーカーから装置状態取得を要求したらONします。 |
| MR900 | 入力 | 受信完了確認 | レーザーマーカーからレスポンスデータを受信完了したらONします。 |
| MR1000 | 出力 | エラーコード有/無状態 | レーザーマーカーから取得した装置状態によってON/OFFを切り替えます。 |
| MR1001 | 出力 | レーザー励起ON/OFF状態 | |
| MR1002 | 出力 | 加工レディOFF/ON状態 | |
| MR1003 | 出力 | シャッタ閉/開状態 | |
| MR1004 | 出力 | 加工開始待ち/加工中状態 | |
| MR1005 | 出力 | 正常/アラートあり状態 | |
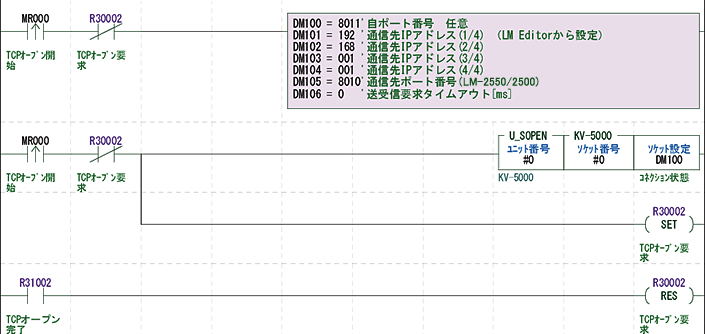
| R30002 | 出力 | TCPオープン要求 | PLCからレーザーマーカーへTCPオープンの要求を出します。 |
| R31002 | – | TCPオープン完了 | PLCとレーザーマーカーの通信が確立したらONします。 |
| R30012 | 出力 | クローズ要求 | PLCからレーザーマーカーへTCPクローズの要求を出します。 |
| R31012 | – | クローズ完了 | PLCとレーザーマーカーの通信が切断したらONします。 |
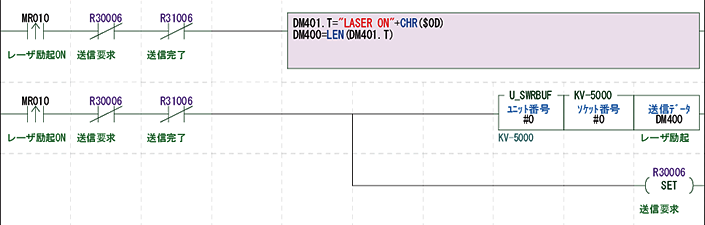
| R30006 | 出力 | 送信要求 | PLCからレーザーマーカーへ送信要求を出します。 |
| R31006 | – | 送信完了 | レーザーマーカーへの送信が完了したらONします。 |
| R30008 | 出力 | 受信要求 | PLCからレーザーマーカーへ受信要求を出します。 |
| R31008 | – | 受信完了 | レーザーマーカーからの受信が完了したらONします。 |
| R31010 | – | 受信データあり | レーザーマーカーからの受信データがある場合ONします。 |
データメモリ
| デバイス名 | 用途 | 備考 |
|---|---|---|
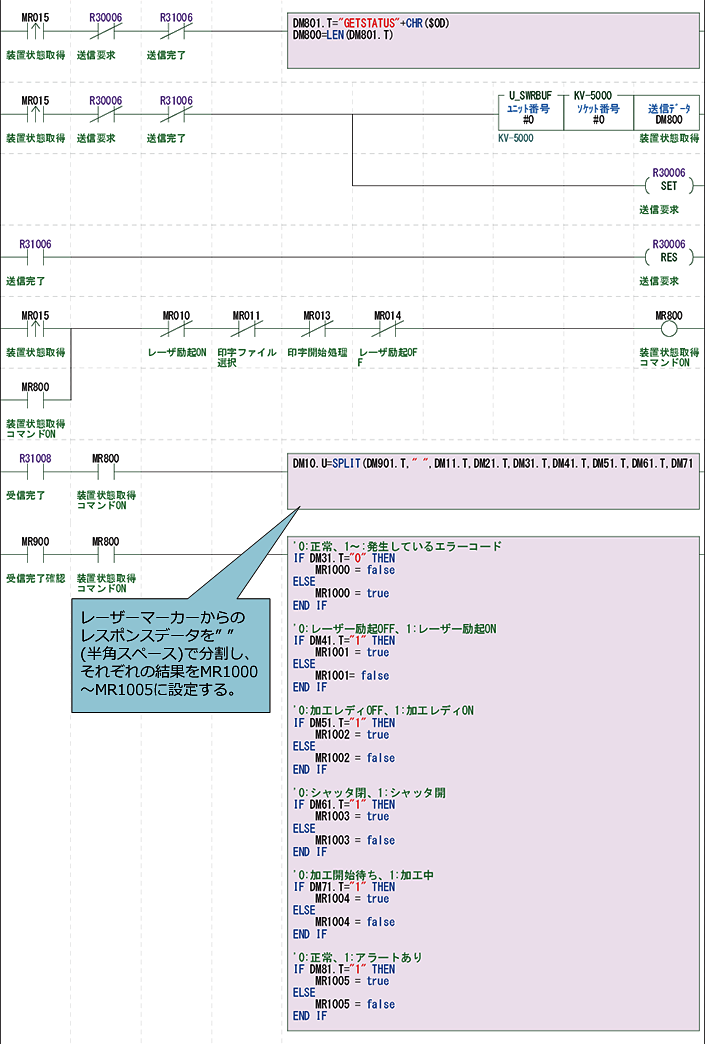
| DM10 | 装置状態取得コマンドに対するレスポンスデータを分割し、結果を格納。 DM900に格納されたレスポンスデータを" "(半角スペース)で分割し、DM11~DM81に格納する。 DM31~DM81の結果をそれぞれ、MR1000~MR1005に設定する。 |
装置状態取得のSPLIT関数の戻り値(分割数) |
| DM11 | "RESULT"(固定) | |
| DM21 | "GETSTATUS"(固定) | |
| DM31 | エラーコード 0:正常、1~:発生しているエラーコード |
|
| DM41 | 0:レーザー励起OFF、1:レーザー励起ON | |
| DM51 | 0:加工レディOFF、1:加工レディON | |
| DM61 | 0:シャッタ閉、1:シャッタ開 | |
| DM71 | 0:加工開始待ち、1:加工中 | |
| DM81 | アラート状態 0:正常、1:アラートあり |
|
| DM100 | ソケット設定 | 自ポート番号 |
| DM101 | 通信先IPアドレス(1/4) | |
| DM102 | 通信先IPアドレス(2/4) | |
| DM103 | 通信先IPアドレス(3/4) | |
| DM104 | 通信先IPアドレス(4/4) | |
| DM105 | 通信先ポート番号(LM-2550/2500) | |
| DM106 | 送受信要求タイムアウト | |
| DM200 | 受信設定(受信データ長(要求)) | 0設定でパケット単位で受信 |
| DM201 | 受信設定(受信データ格納オフセット) | |
| DM400 | 送信データ(レーザー励起) | |
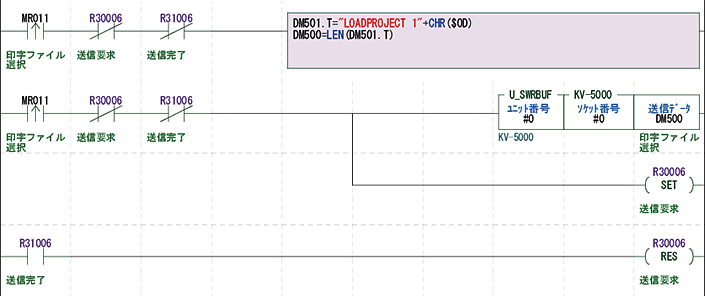
| DM500 | 送信データ(印字ファイル選択) | |
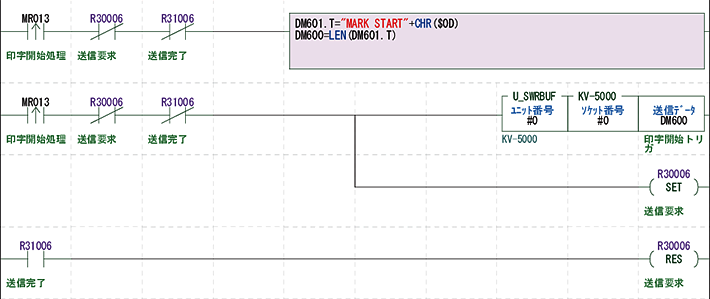
| DM600 | 送信データ(印字開始トリガ) | |
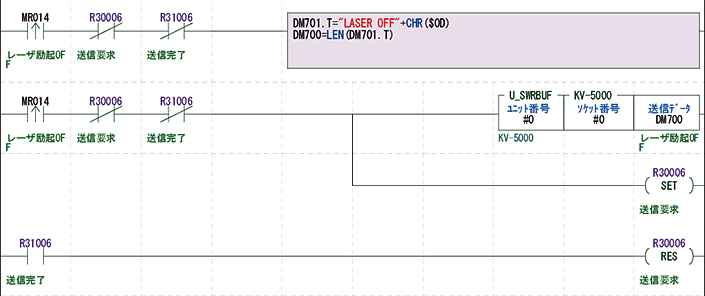
| DM700 | 送信データ(レーザー励起OFF) | |
| DM800 | 送信データ(装置状態取得) | |
| DM900 | 格納デバイス | レーザーマーカーからのレスポンスデータ |
ラダープログラム
通信オープン処理
MR000をONするとレーザーマーカーとの通信を確立します。
レーザ励起
MR10をONすると、レーザ励起状態をONします。
印字ファイル選択
MR11をONすると、印字ファイルNo.1を選択します。
印字開始
MR13をONすると、印字を開始します。
レーザ励起OFF
MR14をONすると、レーザ励起状態をOFFします。
装置状態取得
MR15をONすると、レーザーマーカーの装置状態を取得します。
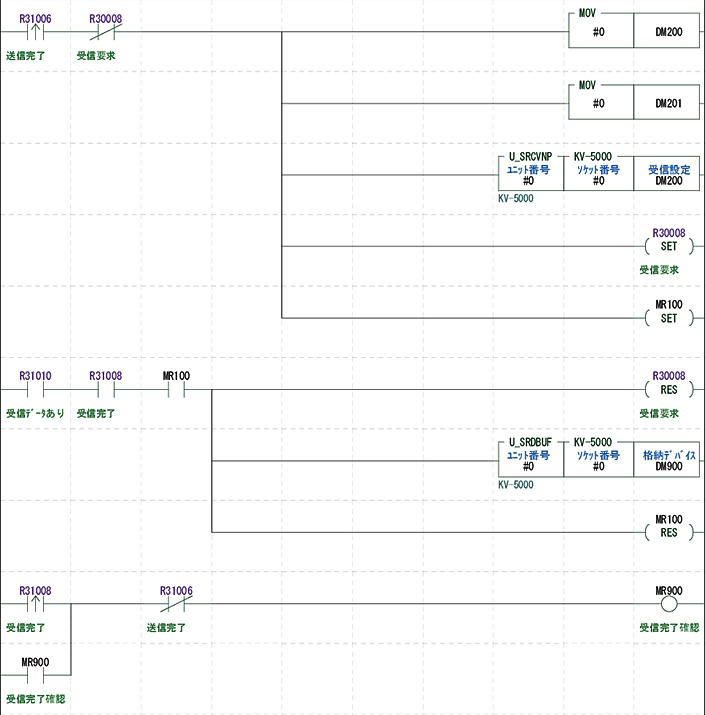
受信処理
- コマンド送信が完了した時点で、受信処理の準備を開始します。
- KVソケットの受信設定データをDM200~に書き込みます。
- レーザーマーカーから受信したデータは、DM900~に格納します。
通信クローズ処理
MR1をONすると、PLCとレーザーマーカーの通信を切断します。

KV-5000 内蔵イーサネット設定方法
ユニットエディタ画面で以下の設定を行います。
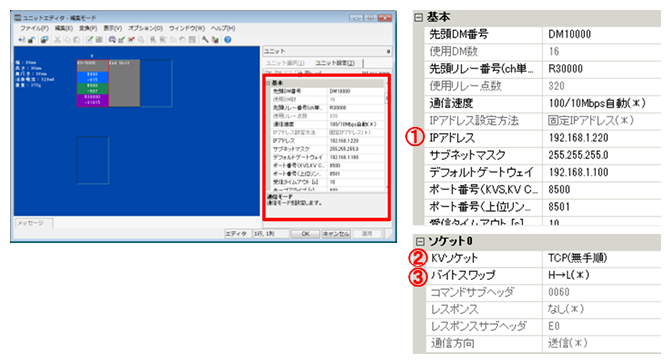
1. IPアドレス:PLCのIPアドレスを設定します。
2. KVソケット:TCPを選択します。
3. バイトスワップ:H→Lを選択します。
ダウンロード
「対象製品」:全機種
「本ソフトウェア」:対象製品を外部に設置されたPLCによって制御するためのサンプルプログラム(ラダー言語)、およびそれに関連する電子文書
ソフトウェア使用許諾契約書
- 以下の契約に同意されるお客様(法人を含み、以下同じ)のみに、本ソフトウェアをダウンロードおよび使用いただけます。
- 本ソフトウェアのダウンロードまたは使用の前に、以下の契約を注意してお読みください。お客様には、参照のため本契約をプリントアウトすることをお勧めします。
![[PDF]](https://bipj.brother.co.jp/wp/wp-content/themes/bip/images/developer/01_pdf.png)
![[新しいウィンドウ]](https://bipj.brother.co.jp/wp/wp-content/themes/bip/images/developer/new_win.png)